МИ ПРОПОНУЄМО
Види датчиків положення поршня
Зміст
Типи датчиків положення поршня.
Контактний або напівпровідниковий датчик ?.
Монтаж датчика пневматичного приводу.
Типи датчиків положення поршня
Контактний або напівпровідниковий датчик ?
Пневматичні системи можуть бути автоматизовані за допомогою датчиків положення поршня. Завдяки розміщенню в поршні магнітного елемента можлива безконтактна сигналізація положення поршня в будь-якому місці за допомогою датчиків магнітного поля. Залежно від конструкції та принципу дії, датчики контролю положення поршня поділяються на два основних типи: контактні та напівпровідникові.
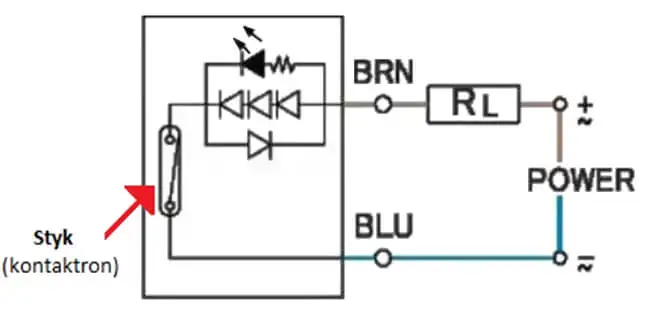
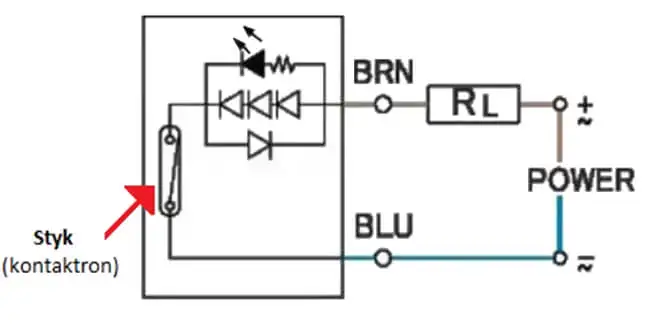
У контактному датчику магніт, розміщений на поршні, викликає контакт так званого контактора, тобто контактного елемента, який, опинившись у магнітному полі, замикає електричний ланцюг, сигналізуючи про це світінням світлодіода, одночасно подаючи напругу і струм на контролер або котушки електроклапанів.
 |
 |
 |
|
Технічні характеристики контактного датчика KT65R
|
Тип: |
KT65R-5M |
|
Тип датчика: |
Контакторний (Герконовий) |
|
Стан: |
Нормально відкритий |
|
Напруга живлення [В]: |
5–240 В DC/AC |
|
Комутований струм: |
100 мА макс |
|
Максимальна потужність: |
10 Вт макс |
|
Падіння напруги: |
макс. 3.0 В |
|
Електричне підключення: |
Кабель PUR, 2-провідний, довжина 5 м |
|
Робоча частота: |
200 Гц |
|
Діапазон температур [°C]: |
-10 / +70°C |
|
Ступінь захисту: |
IEC 60529 IP67 |
|
Світлодіод (LED): |
Червоний |
|
Споживання струму:10 мА 24 В DC макс |
10 мА 24 В DC макс |
Унікальною особливістю магнітних реле є їх низька вартість і те, що вони можуть живитися від змінного або постійного струму. Крім того, реле мають низьке енергоспоживання, що робить їх придатними для застосувань з вимогами до енергоспоживання. Це означає, що вони забезпечують тривалий, безпроблемний термін служби в тисячах циклів з винятковою надійністю. Крім того, магнітні датчики реле є універсальними, легкими, компактними та простими в установці, а для роботи не потребують зовнішнього джерела живлення. Датчики реле не підходять для застосувань, які піддаються сильним вібраціям або ударам. Сильні удари та вібрації можуть спричинити коливання контактів реле, що призведе до неточної сигналізації.
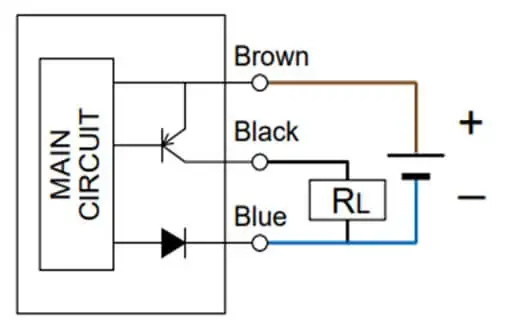
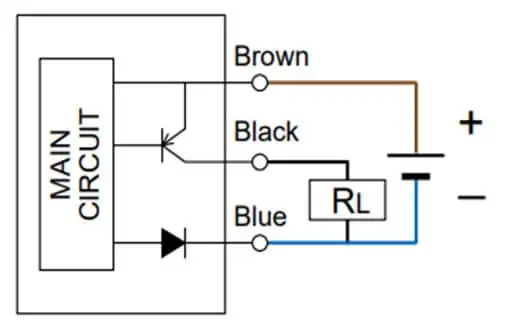
Для передачі положення приводу до блоку управління також можна використовувати напівпровідникові датчики, які використовують ефект Холла. У датчику Холла через тонкий масив протікає постійний струм. Розподіл електронів у всьому елементі є рівномірним, а струм рухається по прямій лінії. Наявність перпендикулярного магніту виштовхує електрони з їх прямолінійного шляху в бік однієї сторони інтегральної схеми. Нерівновага зарядів електронів спричиняє виникнення потенційної напруги, яка при досягненні порогового рівня в ланцюзі датчика спричиняє запуск виходу датчика, який потім подає сигнал до контролера або котушок електромагнітного клапана. Це спрощений опис принципу дії напівпровідникового датчика.
 |
 |
 |
|
Технічні характеристики напівпровідникового датчика KT65P
|
Тип: |
KT65P-5M |
|
Тип датчика: |
Напівпровідниковий, PNP |
|
Стан: |
Нормально відкритий |
|
Напруга живлення [В]: |
10–28 В DC |
|
Комутований струм: |
200 мА макс |
|
Максимальна потужність: |
5,5 Вт макс |
|
Падіння напруги: |
1,5 В макс |
|
Електричне підключення: |
Кабель PUR 5 м, 3-провідний |
|
Робоча частота: |
1000 Гц |
|
Діапазон температур [°C]: |
-10 / +70°C |
|
Ступінь захисту: |
IEC 60529 IP67 |
|
Світлодіод (LED): |
Жовтий |
|
Споживання струму: |
10 мА 24 В DC макс |
Оскільки галотронні датчики є електронними пристроями, вони не мають рухомих частин. На відміну від контакторів, їх час реакції не залежить від магнітної сили, що долає механічну інерцію. Вони працюють швидше і є більш стійкими до ударів і вібрацій. Завдяки повністю електронному режиму роботи термін служби датчиків цього типу теоретично необмежений.
Монтаж датчика пневматичного приводу
Два найпоширеніші типи корпусів пневматичних циліндрів – це профільні ISO 15552 або круглі ISO 6432. Залежно від типу корпусу існують різні методи монтажу.
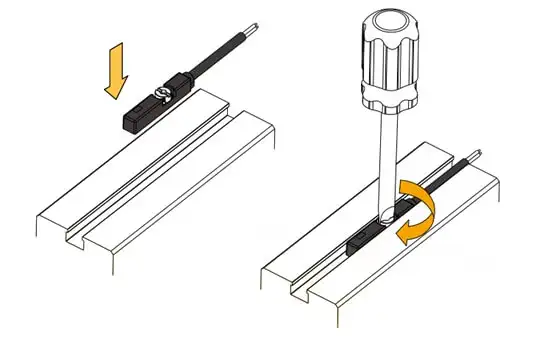
У випадку пневматичних циліндрів, що відповідають стандарту ISO 15552, вздовж корпусу розташовані канавки, що дозволяють розмістити датчик, який потім слід закріпити в обраному місці за допомогою гвинта.
На круглих циліндрах ISO6432 датчики можна встановлювати за допомогою хомута MFX, який охоплює корпус циліндра. Хомут слід підбирати відповідно до діаметра циліндра. Після встановлення датчик і хомут можна переміщати вздовж циліндра, а потім закріпити в потрібному місці.

Підсумок
Контактні датчики є універсальними, їх можна використовувати в системах з змінним або постійним струмом. Завдяки герметичному корпусу їх можна використовувати в умовах високої температури та сильного запилення. На жаль, контактні датчики не підходять для систем, де вони піддаються вібраціям або ударам. Сильні удари та вібрації можуть спричинити коливання контактів реле, що призведе до неточної сигналізації положення поршня.
Перевагою напівпровідникових датчиків є відсутність рухомих механічних елементів, що робить їх повністю стійкими до ударів і вібрацій. Вся схема складається з напівпровідникових елементів, які захищені від коротких замикань і перевантажень. Напівпровідники характеризуються дуже високою частотою перемикання, що особливо важливо для застосувань, які вимагають швидкої роботи приводів. Однією з найбільших переваг датчиків цього типу є також те, що вони пристосовані для використання в системах з ПЛК-контролерами.
|
Тип: |
KT65R |
KT65P |
|
Тип датчика: |
Контакторний (Герконовий) |
Напівпровідниковий, PNP |
|
Стан: |
Нормально відкритий |
Нормально відкритий |
|
Напруга живлення [В]: |
5–240 В DC/AC |
10–28 В DC |
|
Комутований струм: |
100 мА макс |
200 мА макс |
|
Максимальна потужність: |
10 Вт макс |
5,5 Вт макс |
|
Падіння напруги: |
макс. 3.0 В |
1,5 В макс |
|
Електричне підключення: |
Кабель PUR, 2-провідний |
Кабель PUR, 3-провідний |
|
Робоча частота: |
200 Гц |
1000 Гц |
|
Діапазон температур [°C]: |
-10 / +70°C |
-10 / +70°C |
|
Ступінь захисту: |
IEC 60529 IP67 |
IEC 60529 IP67 |
|
Світлодіод (LED): |
Червоний |
Жовтий |
|
Споживання струму: |
Немає |
10 мА 24 В DC макс |
 |
 |




Автор